Udacity - Artificial Intelligence for Robotics

Udacity - Artificial Intelligence for Robotics
English | .FLV | aac, 44100 Hz, stereo | h264, yuv420p, 854x480, 29.97 fps(r) | 2.21GB
Genre: E-learning
English | .FLV | aac, 44100 Hz, stereo | h264, yuv420p, 854x480, 29.97 fps(r) | 2.21GB
Genre: E-learning
Learn how to program all the major systems of a robotic car from the leader of Google and Stanford's autonomous driving teams. This class will teach you basic methods in Artificial Intelligence, including: probabilistic inference, planning and search, localization, tracking and control, all with a focus on robotics. Extensive programming examples and assignments will apply these methods in the context of building self-driving cars.
Success in this course requires some programming experience and some mathematical fluency.
Programming in this course is done in Python. We will use some basic object-oriented concepts to model robot motion and perception. If you don’t know Python but have experience with another language, you should be able to pick up the syntax fairly quickly. If you have no programming experience, you should consider taking Udacity’s Introduction to Computer Science course before attempting this one.
The math used will be centered on probability and linear algebra. You don’t need to be an expert in either, but some familiarity with concepts in probability (e.g. probabilities must add to one, conditional probability, and Bayes’ rule) will be extremely helpful. It is possible to learn these concepts during the course, but it will take more work. Knowledge of linear algebra, while helpful, is not required.
Lesson 1: Localization
Localization
Total Probability
Uniform Distribution
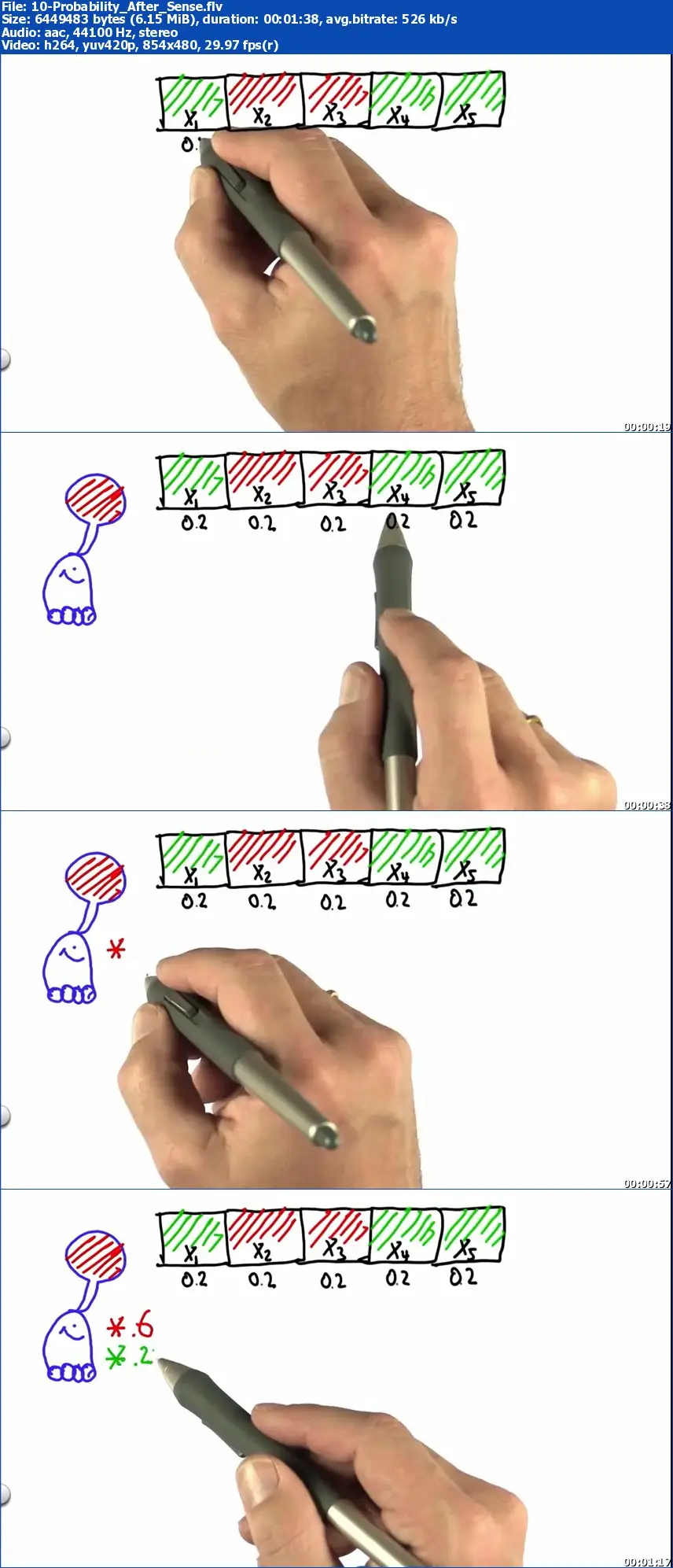
Probability After Sense
Normalize Distribution
Phit and Pmiss
Sum of Probabilities
Sense Function
Exact Motion
Move Function
Bayes Rule
Theorem of Total Probability
Lesson 2: Kalman Filters
Gaussian Intro
Variance Comparison
Maximize Gaussian
Measurement and Motion
Parameter Update
New Mean Variance
Gaussian Motion
Kalman Filter Code
Kalman Prediction
Kalman Filter Design
Kalman Matrices
Lesson 3: Particle Filters
Slate Space
Belief Modality
Particle Filters
Using Robot Class
Robot World
Robot Particles
Lesson 4: Search
Motion Planning
Compute Cost
Optimal Path
First Search Program
Expansion Grid
Dynamic Programming
Computing Value
Optimal Policy
Lesson 5: PID Control
Robot Motion
Smoothing Algorithm
Path Smoothing
Zero Data Weight
Pid Control
Proportional Control
Implement P Controller
Oscillations
Pd Controller
Systematic Bias
Pid Implementation
Parameter Optimization
Lesson 6: SLAM (Simultaneous Localization and Mapping)
Localization
Planning
Segmented Ste
Fun with Parameters
SLAM
Graph SLAM
Implementing Constraints
Adding Landmarks
Matrix Modification
Untouched Fields
Landmark Position
Confident Measurements
Implementing SLAM
Lesson 7: Final Exam
Screenshot:

Udacity - Artificial Intelligence for Robotics